")







联系我们:186 6505 3298



Altair ROPS:为农机、重工、重卡等领域设备提供自动化分析建模利器
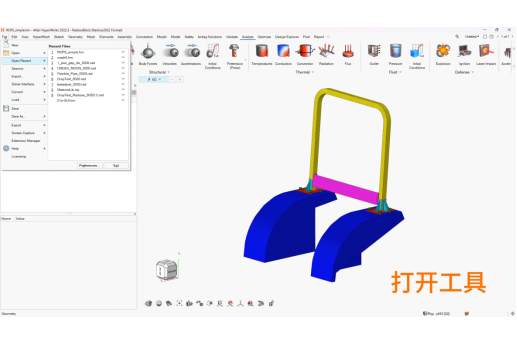
上一篇我们介绍了关于Radioss求解器帮助实现优化被动安全的连续加载分析和仿真流程,接下来我们继续来了解一下Altair ROPS在农机、重工、重卡等设备的分析自动建模工具。
ROPS 分析自动建模工具
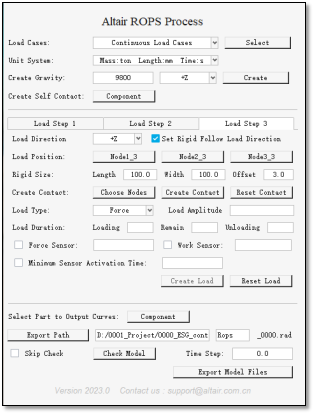
l工况支持设定为 “连续加载” 或 “独立加载”
l支持自定义 “不同加载方向” 及 “加载先后顺序”
l载荷类型可选 “位移” 或 “力”,支持自定义载荷强度和“加载-保持-卸载”时间
l自动建立 “整机自接触” 和 “每次加载接触”,自动检查 “干涉和穿透”
l持续监控 “加载力” 和 “加载做功”,自动结束加载
l模型检查,自动计算时间步长
l一键输出完整模型,支持自动连续计算
l支持多种常用单位制,支持自定义重力大小及方向
l自主开发,保持更新
l匹配 HyperWorks 2022.3 及以后版本
提交计算
通常 ROPS 分析的模型都比较复杂,网格数量多,推荐使用并行计算。
l本地提交计算:option 中填写 “-np 计算机CPU核数”
lHPC 平台:直接选择 core 数量即可
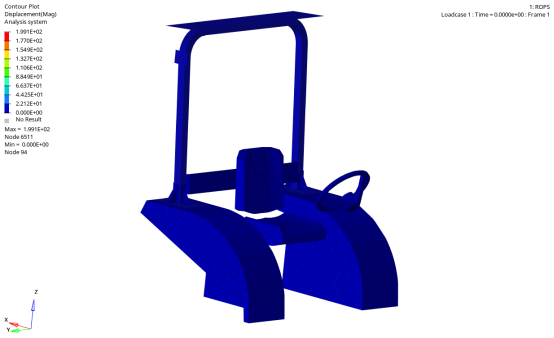
结果查看
计算结束后,结果文件包括以下类型:
lOut 文件:文本文件,0000.out 记录模型检查信息,0001.out 记录计算过程中各种能量的变化以及误差,单元失效,sensor 状态,计算时间等。
lA 文件、h3d 文件:动画文件,使用HyperView查看,包含结果云图,A文件为单独一帧,h3d 为整个过程。
lT 文件:记录 time history 曲线,使用HyperGraph查看,包含默认输出的内能、动能、接触能、沙漏能等能量曲线,以及在结果输出中定义的各个 /TH 卡片所选的节点、单元、接触等输出曲线。
l多个 A 文件、T 文件,读取 A001、T01即可自动关联读取所有同类型文件。
结果查看 – 动能&内能曲线
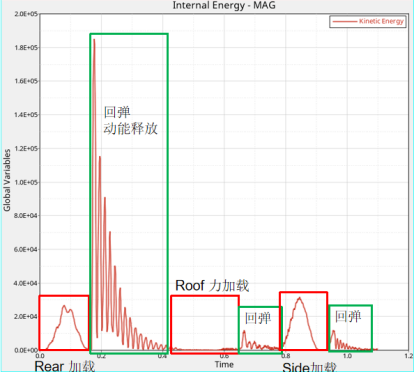
卸载后结构抖动,使用动能释放快速回归静止
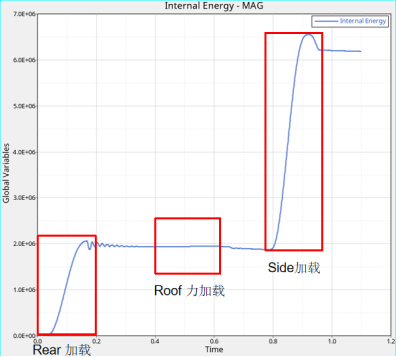
次加载后变形累计,内能不断增加
结果查看 – 力
l推力可以通过压溃板上刚体单元输出,也可以通过接触输出。
lSensor 用于监控刚体单元上的力,其判断标准为连续 0.005s 内作用力始终大于 14000N 时激活。
l0001.out文件中有 sensor 激活的提示:
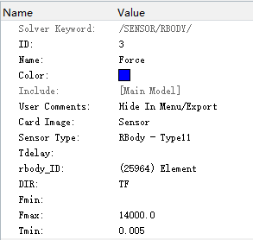
图:sensor 参数设定
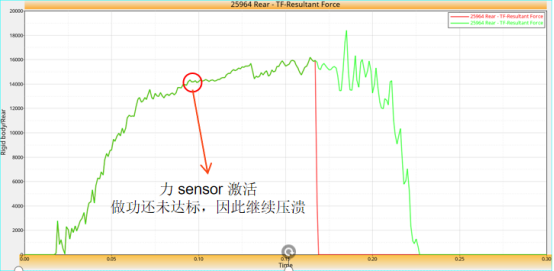
图:接触力-时间曲线
绿色曲线为未设定sensor的曲线,红色线为使用sensor控制接触的曲线
前半段两条曲线重叠颜色为深绿色
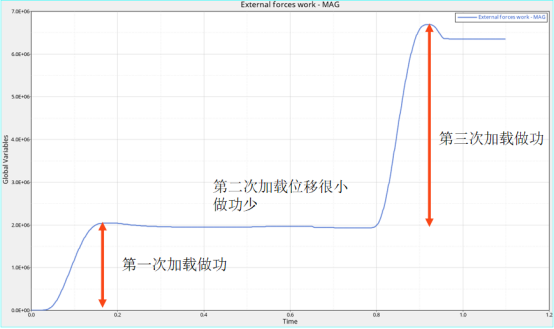
结果查看 – 做功(直接读取)
可以通过 Global Variable 中 External Force Work 读取外力工
结果查看 – 做功(积分)
首先需要输出刚体单元主节点的位移

使用积分功能,计算做功 = 积分(位移*力)
Tips:加载 Vehicle safety tools 后,可以在力曲线上点击右键,Math》Integral
然后修改函数中蓝色部分即可
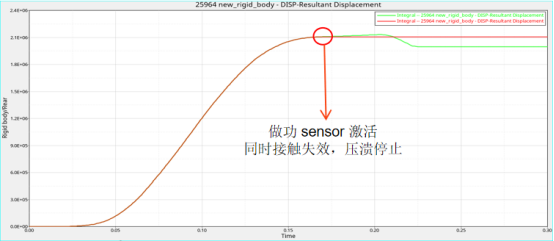
结果查看 – 做功:使用 sensor 监控
Sensor 用于监控做功,设定刚体主节点ID定义位移,设定刚体单元定义力,sensor自动计算做功,在 0.005s 内做功持续超过 2100J,sensor 依次激活。Out 文件中有说明 sensor 状态及先后顺序。