")







联系我们:186 6505 3298



Altair(HyperWorks)CAE软件基础教程【1D网格划分(2)】
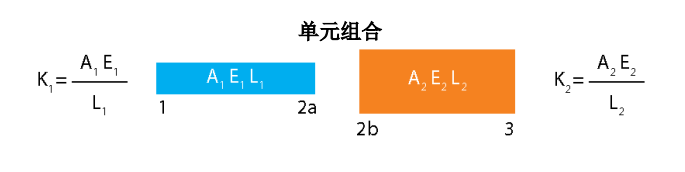
刚度矩阵 – 2个Rod单元组合

点3上有一个力,那么点1和点2的力会是怎样呢?在看答案之前,请闭上眼睛并想象各点的力。
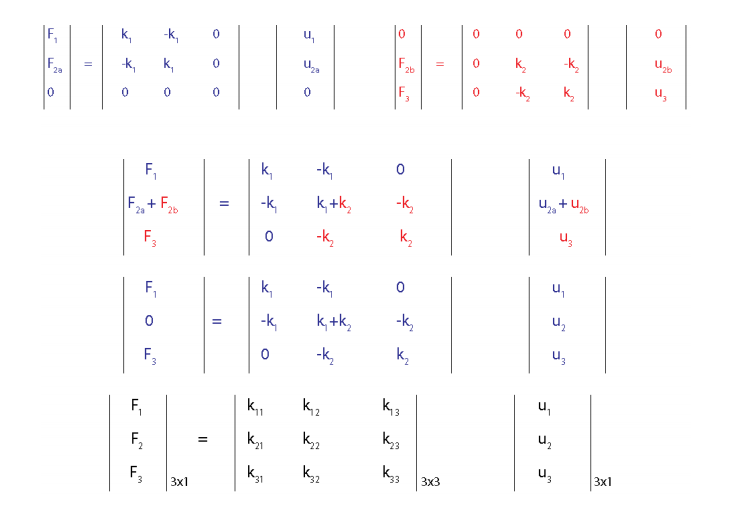
对于平衡方程Σ Fx = 0。点1的支反力是–F,点2的支反力是0。
受力分解图为:

点2的合力 = - F + F = 0
在任一个有限元模型中,内部节点的合力与合力矩为零(除了施加约束和载荷的节点)。模型总体的合力与合力矩为零。(外力和外力矩 = 支反力和支反力矩)。为了保证正确的结果,这是一步重要的检查。
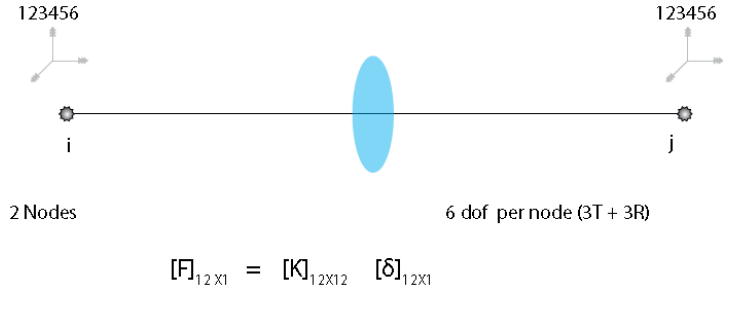
Beam单元
Beam单元是非常通用的一种单元类型(每节点6个自由度,3个移动自由度和3个转动自由度)并频繁使用在各种场合。
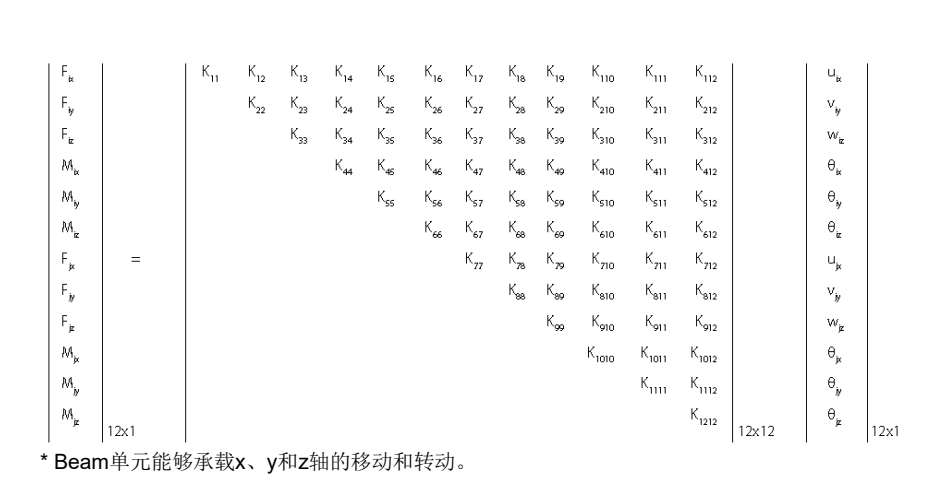
Beam/Bar单元的特征
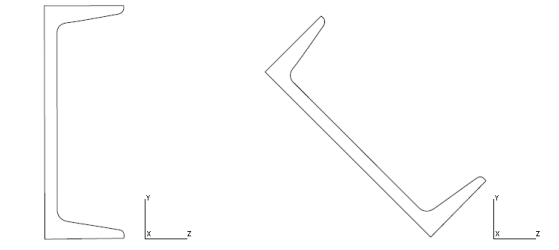
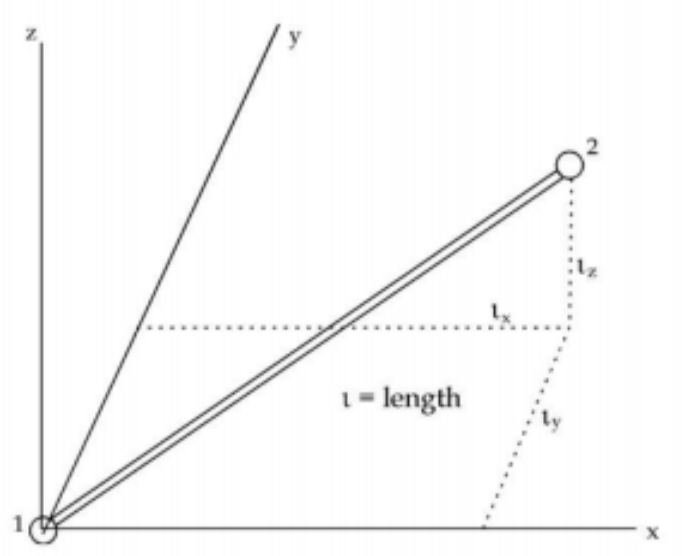
a. 截面的方向
大多数商业软件都支持改变截面方向的角度,后面将深入讨论。
Rigid单元
Rigid单元被设计用来简化约束方程常用配置的输入。他们不是结构单元,而是定义自由度之间相互关系的方程。rigid单元任一方面不正确的配置都会导致大范围的输入错误,所以要小心使用它们。自然界中并没有完全刚性的材料,rigid单元通常是结构的简化表达形式。总而言之,一个rigid是一个约束方程,或者是一个以下格式的约束方程的集合:
A1 u1 + A2 u2 + A3 u3 ...= 0;
这里A = 常数,u = 自由度。通常,一个自由度依赖于其它所有的自由度。
RBAR单元
RBAR“单元”把1到6个从动自由度刚性连接至6个主动自由度。这6个主动自由度必须能够描述单元的刚体属性。
如果刚性单元太长或与结构长度相当,并且与结构强烈耦合,很有可能会增大结构刚度。这时使用结构单元简化表达形式会更好。使用刚性单元模拟紧固件,比如螺栓,通常会导致连接处刚度偏大。使用beam单元模拟螺栓不仅是一个更好的表达形式,还允许轻松输出力。
正确应用刚性“单元”
相对于你研究的结构来说,当一个结构的部分很硬并且很轻,这种情况就可以使用刚性单元。比如一个发动机通过软性的支架连接至车架。如果发动机的变形对车架影响很小,那么发动机就可以被认为是刚性的。
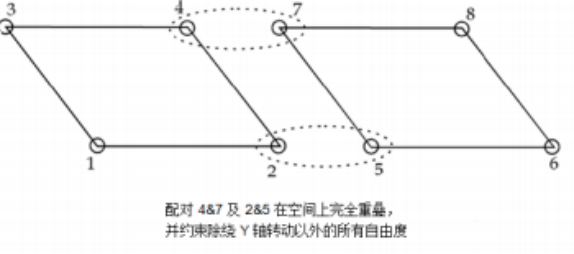
刚性单元也适合用来模拟机械装置,比如结构中的一个铰链。这时,两个节点放置在相同的位置,并且仅把耦合的自由度约束在一起。实际上,这种零长度的刚性单元是刚性单元的一种非常重要的应用。下图描述一个铰链。
RBE和MPC单元的网络研讨会
我们录制了一个网络研讨会关于怎样使用RBE和MPC单元。同时讨论了可能的错误以及它们对结果的影响。另外,给出建议以避免出现这些错误。








