")







联系我们:186 6505 3298



OptiStruct的转子动力学分有限元建模
OptiStruct转子动力学采用固定参考坐标系进行求解,转子动力学建模规则如下规则1--转子模型必须是1D、0D或超单元模型,即当转子是1D线模型时才有效。用于转子动力学系统建模的单元类型如下。
(1)1D梁单元(CBAR、CBEAM)和弹簧单元(CBUSH、CELAS)。
l梁单元至少为转子提供刚度。
l梁单元的质量和转动惯量也考虑在陀螺效应中。
l可以提供结构阻尼。
(2)0D质量单元(CONM2)
提供了陀螺效应中需要考虑的附加质量和惯性。
(3)CMS超单元。
l由于转子动力学不能在转子上显式地包含2D或3D单元,因此它们通常由沿转子轴连接在特定节点的简化超单元所代替。
l这些超单元将表征转子的刚度、质量、惯性和阻尼等。
规则2——转子(即旋转部件)和定子(即固定部件)必须始终通过刚性单元(如RBERBAR、RROD)或MPC单元来连接(见3.5.4节连接单元)。
规则3——可以增加轴承模型,通常可以使用弹簧(CELAS)和阳尼单元(CDAMP)来将承和定子连接起来,并在和转子旋转轴垂直的方向设置弹簧刚度。
规则4——轴对称转子。OptiStruct中的转子动力学分析基于轴对称转子的假设,即转子模型需要关于旋转轴对称。
以下就一些建模细节做进一步说明。
(1)转子轴建模
转子旋转轴通过RSPINR/T卡片中的节点A和B指定,这些节点可以有用户定义的输人坐标系(可能影响旋转轴的方向)或者用户定义的输出坐标系(不影响旋转轴的方向)。其他节点通过ROTORG 定义为转子,这些转子节点必须和AB 共线,否则会报错,如图11-5 和图11-6所示。
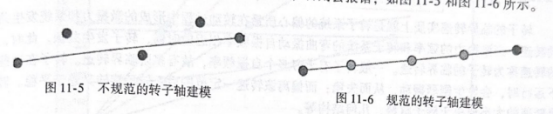
不规范和规范的子轴建模
(2)多个转子模型
一个OptiStruct转子动力学模型可以包含多个转子,每个转子通过ROTORG定义,并通过RSPINR/T卡片定义属性。除了瞬态分析,每个转子由RGYRO卡片关联。多个转子可以同轴,即共用同一条旋转轴线,也可以多轴,即有不同的旋转轴线。
(3)转子动力学中的模态跟踪
模态跟踪检查、追踪系统各个状态的模态振型,模态跟踪方法可以由RSPEED卡片的MDTRK域值来定义。模态跟踪默认前后两个状态下的振型足够接近,以保证振型的正交性,模态跟踪方法是跨转速的,可以使坎贝尔图显示更清晰。
(4)转子系统的连接件建模
在转子动力学建模中,连接件(轴承和支撑结构)的建模是最关键的部分,通常这部分的工作需要在前处理中仔细处理,有经验的工程师也可以直接手动编写.fem文件,这样会比使用前处理建模更方便。如图11-7所示,该部分的建模工作遵循几个基本原则:①使用3个空间位置完全重合的节点分别代表转子(G1)、轴承内圈(G2)和轴承外圈(G3,通常认为轴承外圈和支撑结构固接):②C1和 G2之间使用RBE2单元固接;③C2和 C3之间使用弹簧阻尼单元连接,以模拟基本的轴承等连接件的刚度和阻尼。弹簧阻尼单元通常使用垂直于转子自转轴平面内的两个方向的刚度和阻尼。
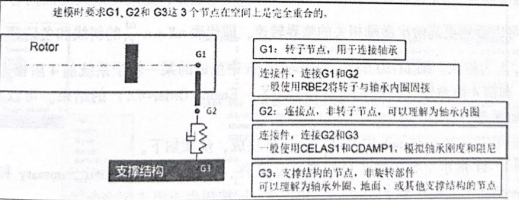
连接建模的示意图图11-7
图11-8所示为典型转子弹簧建模的局部.fem文件,X方向为转子自转轴,在丫轴和Z轴分别建立1D弹簧单元 CELAS1。其中,1005 和 1006 单元代表转子一端的轴承刚度,1007 和1008 单元代表转子另一端的轴承刚度。
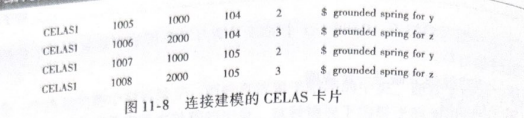
图11-8连接建模的CELAS卡片
本篇内容取自HyperWorks进阶教程系列的《OptiStruct结构分析与工程应用》,版权归原作者所有,如有侵犯您的权益,请及时联系我们,我们将立即删除。








