







联系我们:186 6505 3298






Optistruct实例:控制臂柔性体生成
本例通过控制臂模型来演示OptiStruct 如何为 MotionSolve 创建柔性体。控制臂模型如图 28-1 所控制臂通过铰连接在底盘系统上,为了在多体动力学分析中直接对控制臂进行应力、应变分小。析,需要将控制臂用柔性体代替。首先对控制臂模型划分网格,在相应的连接点创建 RBE2 单元,RBE2 的主节点为部件的实际连接点。将RBE2的主节点作为边界点,对控制臂模型生成超单元,供 MotionSolve 使用。基础模型仅包含网格,需要设置材料、截面属性、边界条件及模态综合法控制卡片等。

图 28-1控制臂模型
模型设置
Step 01创建材料参数。在模型浏览器中右击并选择Cre创建材料,创建后将材料重命名为steel,并设置ate-> Material.材料参数,E 设为 210000,NU 设为 0.3,RHO 设为 7.9e-06如图 28-2 所示,
Step 02 创建属性。
在模型浏览器中右击并选择 Create>Propenty,创建属性,创建后将其重命名为Pshell,并设置属性参数,Card lmage 选择 PSHELL,Material 选择 steel,T=3,作为属性厚度,如图 28-3 所示。创建后在 component 中单击 Pshell 1,选择属性 Pshell,将属性附给单元。
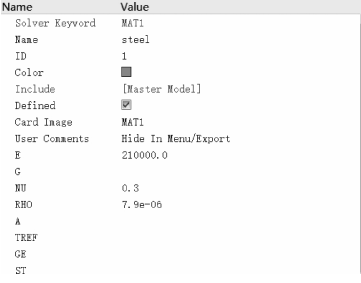
图28-2 创建材料

图 28-3创建属性
Step 03对需要在多体动力学分析中建立连接的点施加约束创建 Load Collector,命名为 Aset。进人 Analysis->constraints 面板,nodes 分别选择模型中三个RBE2 的主节点,load types 选择 ASET.这里为了简单起见,假定3个连接点都是固定约束,故约束了它们的所有自由度,如图 28-4所示。实际情况中,这些连接点并不是固定约束,比如某个连接点为球铰,则这个 RBE2的主节点只需要约束1、2、3 自由度即可。

图28-4 创建 ASET
Step 04继续创建 Load Collector,命名为 CMSMETH,Card Image 选择 CMSMETH,单击 create/edit 按钮,在弹出的新面板中选择METHOD为CB,NMODES 为20(NMODES 为模态阶数),如图28-5所示。
Step 05创建控制卡片。在 Analysis->control cards 面板选择 DTI UNITS,设置模型中的计算单位,MASS 为 KGLENGTH为 MM,其他参数保持默认。这里的质量和长度单位需要和前面设置的材料密度单位保持一致,如图 28-6 所示。
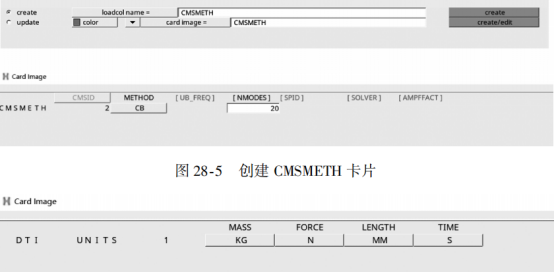
图28-6创建 DTI UNITS
在 Analysis->control cards 面板选择 GLOBAL CASE CONTROL,在弹出的新面板中勾选 CMSMETH,然后单击 CMSMETH 按钮选择 Load Collector 中的 CMSMETH,如图 28-7 所示。
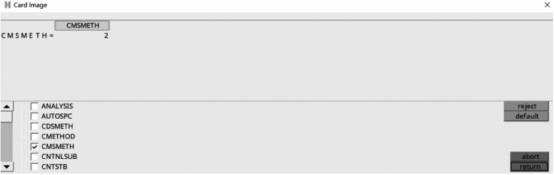
图 28-7 引用CMSMETH
在 Analysis->control cards 面板选择 OUTPUT,在 KEYWORD 中选择柔性体输出文件格式。可以选择输出 H3D 给 MotionSolve 多体动力学求解器,也可以选择其他格式,如 ADAMSMNF等,如图 28-9 所示。
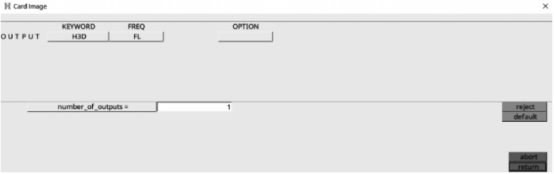
图28-9 文件格式设置
Step 06在 Analysis->OptiStruct 面板保存模型并提交计算,
结果查看
在 HyperView 中打开.h3d文件,在左边的结果栏可以看到前6个频率非常小。这6个频率对应刚体模态,理论上应该为0,但是由于数值误差,它们只是接近于0。频率结果显示总共输出了 38个频率点,如图 28-10 所示。而在模型中只设置了 20 阶模态,剩余 18 个频率点的模态是由于采用ASET约束了3个点的6个自由度,在每个自由度上产生了一个残余模态。残余模态用来改善计算结果的精度。
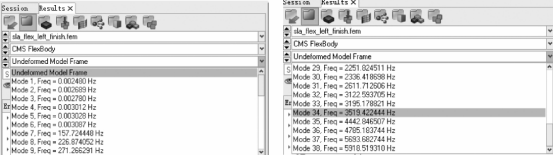
图28-10频率点
选择第7 个频率点,在 HyperView 中查看相应的振形、位移及应力,如图 28-11 所示。
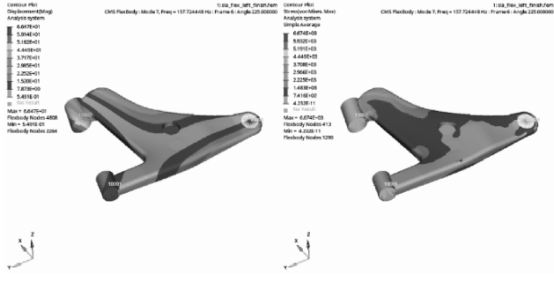
图28-11 结果云图
本篇内容取自HyperWorks进阶教程系列的《OptiStruct结构分析与工程应用》,版权归原作者所有,如有侵犯您的权益,请及时联系我们,我们将立即删除。







